Analysis of Pre-Handover Peak Speed Timing and Behavior for Human Givers and Receivers
Aug 25, 2025
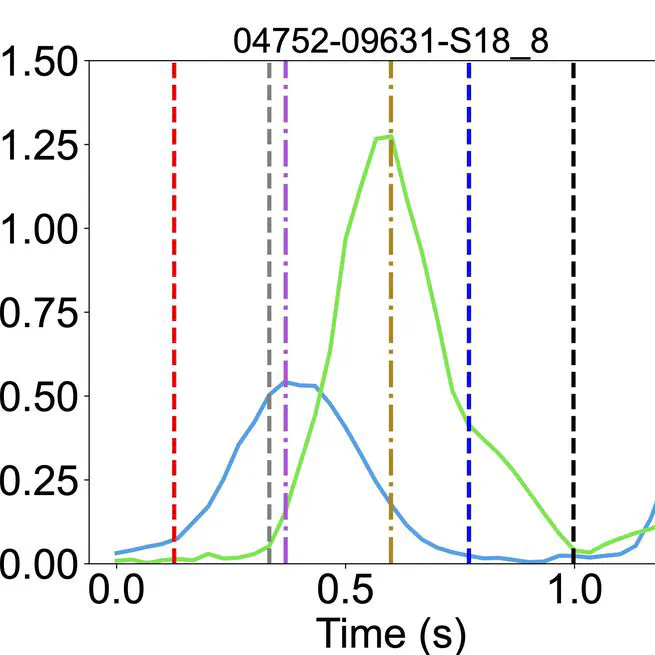
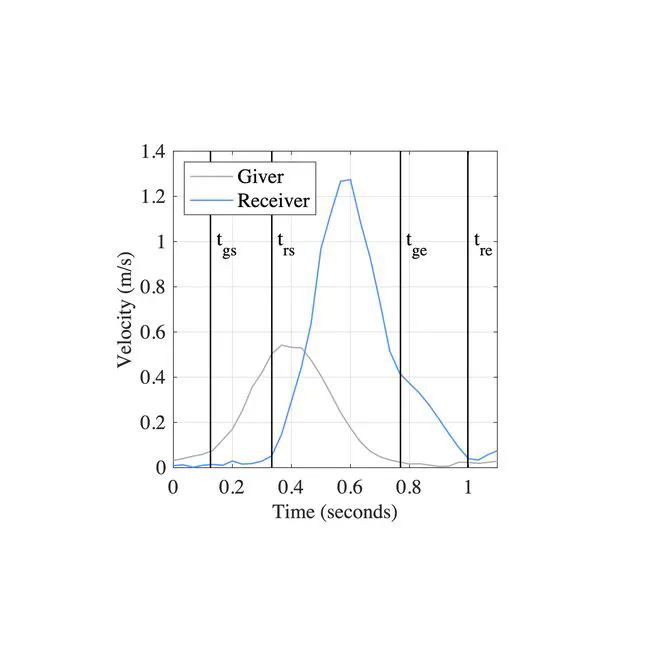
Using Human-Human Handover Data to Analyze Giver and Receiver Timing Relationships During the Pre-Handover Phase
We study the relationships between the timings of giver and receiver motions in human-human handover interactions, in order to inform human-robot handover.
Aug 26, 2024
Using Human-Human Handover Data to Analyze Giver and Receiver Timing Relationships During the Pre-Handover Phase
We study the relationships between the timings of giver and receiver motions in human-human handover interactions, in order to inform human-robot handover.
Aug 26, 2024
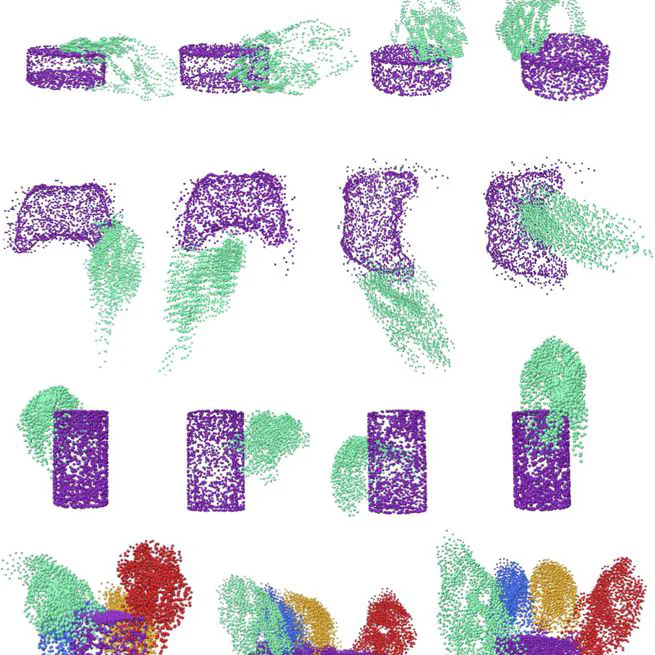
GraspPC: Generating Diverse Hand Grasp Point Clouds on Objects
We present GraspPC, an approach to perform learning-based synthesis of multiple human hand grasps as point clouds from point clouds of objects to inform robotic manipulation algorithms on how to bias robotic grasp for safe handover.
Aug 26, 2024